模型在线修正
题目
Large-Scale and Drift-Free Surface Reconstruction Using Online Subvolume Registration
概述
本系统支持模型的在线修正,而不需要重新处理或存储任何输入深度数据。即使在进行大型的三维模型的全局校正时,我们的方法只需要几分钟,而不是几小时来计算。我们的模型不需要任何明确的循环闭合(loop closures)去分析,最后,依靠单独的深度数据,允许在低照明条件下操作。
解读:
现有的技术一般存在着以下(一个或多个)的弊端:
-
需要昂贵的离线全局优化步骤花费数小时来计算;
-
需要一个完整的二次传输的输入深度帧以校正累积误差;
-
依靠RGB数据以及深度数据来优化形态(pose);
-
要求用户创建显式循环闭合,以允许重大的对准误差得到解决。
而本系统则为解决这些所有的问题,提出了一个新思路。
论文内容
问题
首先,密集估计的符号距离函数需要限制适用性超越中等大小空间的GPU内存量。
其次,大型探索序列(large exploratory sequences)必然导致轨迹估计,导致错位融合到测量全局TSDF模型漂移。这反过来,进一步恶化的跟踪过程
低漂移本地建模(Low-drift Local Modeling)
为了克服上述问题,并能够扫描较大环境KinectFusion框架,采用在所述的活动量的方法的一个简单的变体——不固定大小的体积模型,而是融合TSDF测量到它被移到旁边的摄像头估计轨迹的有效体积。
最初,将相机放置在活动卷的中心,并且当所估计的相机翻译不同于体积中心超过给定阈值,转移活动卷。出于效率的考虑,我们只允许像素级的变化,将环境的全局模型从局部TSDF集合中脱离出来(后文详述)。这个过程不可避免地打破了网络的最终重建,从而使我们能够不断跟踪传感器构成对局部空间的本地可靠的模型,使我们减少误差。
虽然这个过程只能在轨道流水线(tracking pipeline)中,但它只取决于三维像素的值,所以可以实现实时操作。
子卷注册(Subvolume Registration)
我们通过全局优化子卷,构成了新的子卷,而非刚性变形是通过一种新的卷积混合解决。值得注意的是要指出,不需要由照相机跟踪模块,因此可保持操作的实时和推动新的子卷(Subvolume)到共享缓冲器允许姿势优化,从而来运行并行处理优化的结果。
ICP方法:
-
提取子卷的零水平集(zero-level set),以便获得一组点及法线;
-
我们考虑子卷的边界,并找到有重叠边界的其他子卷
-
对于子卷的每一个点,我们寻找子卷距离函数的梯度对应关系
-
每个有效对应,引入了一个点到面距离约束来优化问题;
-
若姿态在约束中,至少加入一个姿态到姿态(pose-to-pose)的误差项,以确保全局一致性;
混合卷
在子卷的不同的数据源生成的距离函数,零水平集会有稍微不同的位置,主要是由于有限的噪声卷积通过仅退K集成滤波实现的。因此,多张重叠的表面和工件,如可能会出现非刚性变形。为了解决这个问题,在整个覆盖所有的子卷的空间延伸的全局卷FG的估计。
但是,重采样子卷到一个新的全局卷需要遍历整个集合。这可以仅通过查询每个子卷发现。此外,全球卷的大小,直接取决于所述相机路径,从而使广泛的探索可能产生大量的空体(null voxels)。因此,计算时间更多地由子卷决定,而不是由它们的数量和范围的相对位置。
关于计算时间,一方面,如果该子体积不重叠,所需要的时间是零。另一方面,如果所有的子卷被重叠时,复杂性将是二次子卷数目。然而,我们通过实验发现,计算时间强烈地受到体素的总数,而不是重叠的量支配,所以,混合卷的方法比全局卷重采样的十倍还更快。
(作者注:混合卷只是为了提高网格表面重建,没有这个步骤的话,相机和子卷映射也都可以工作。)
其他
这周和老师申请了实验室的Kinect,然后几经周折,终于和泽宇师兄拿到了设备。自己现在宿舍把环境搭建了起来。
首先需要下载官方的环境确认软件,确定当前电脑的环境是不是适合使用Kinect。按照上面的指引,连接了设备并运行了软件,得到解决是可以运行。但是USB控制器不确定是不是可以使用。不过因为我确定我的电脑是有USB3.0的,所以可以先忽略这个问题。

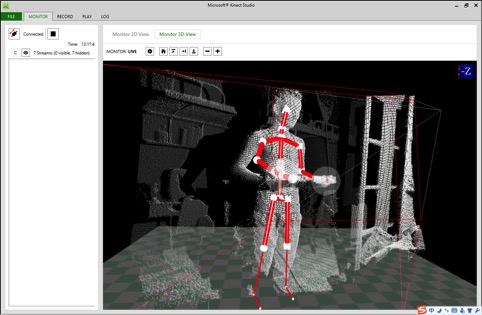
确认了环境之后,按照微软的官网的教程,下载了Mircrosoft Kinect Studio。打开并连接了设备之后,可以看到正常运行的Kinect摄像头拍摄的深度影像,以及它自身的深度探测和骨骼识别出来的效果。
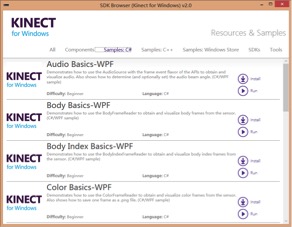
确认可以使用之后,为了更好地了解,我先打开SDK Brower,看看里面有什么可以用的资源。在里面看到了一些微软自带的演示程序,所以我下载了试一下。运行了一下,了解它到底是怎么操作的。代码还没怎么看懂,还在慢慢研究。
心得
这周本来想利用周末好好来研究一下Kinect的API是怎么使用的,但是周末刚好有家乡的亲戚过来看我,所以原计划也就泡汤了。不过也总算是配置好了Kinect的环境并且确定了自己可以用。
Sample的代码还是有稍微看一下的,毕竟没有很明白,不知道应该写成什么所得,所以干脆等到下个星期再研究看多一点的sample看看有没有什么收获。